De Landje robot heeft zijn eigen set van opdrachten die je hem kunt geven, een instructie-set. Met deze instructies kun je de robot eenvoudig besturen.
Elke programma voor een Landje Robot moet beginnen met de volgende instructies. Deze instructies hoef je niet te begrijpen. Je kunt deze instructies gewoon boven aan elke robot programma plakken.
#include <LandjeRobot.h>
// Aansluitingen van de robot motors.
const int motor[2][4] = {
{2, 3, 4, 5}, {6, 7, 8, 9}
} ;
// Aansluitingen van de lijn sensoren
const int lineSensors[2] = { 10, 11 } ;
// Lichte vloer met donker lijnen = true
// Donkere vloer met lichte lijnen = false
const bool lineSensorInverse = true;
// Omtrek van de wielen in cm
const int wheelRadiusMM = 21 ;
// Afstand tussen de wielen in cm
const int trackWidthMM = 98 ;
// Aansluiting van de ultrasoon sensor
int ultraPin = 13 ;
// Aansluiting van de servo
int servoPin = 14 ;
// Aansluiting van het led
int mouthledPin = 15 ;
// Aansluiting van de mode schakelaar
int switchPin = 0 ;
LandjeRobot landjerobot(motor, LandjeRobotMotorController::STEPMODE::FULL_STEP, wheelRadiusMM , trackWidthMM, lineSensors, lineSensorInverse, ultraPin, servoPin, mouthledPin, switchPin) ;Deze instructies moeten voor de functie setup() in het programma geplaatst worden. Knip en plak deze instructies voor aan ieder programma dat je voor de robot schrijft.
De Landje robot heeft verschillende eigen instructies. Je hebt instructies om te bewegen, te draaien of bijvoorbeeld om de afstand te meten. Deze instructies geeft je aan de Landje Robot die deze instructies dan weer opvolgd. In het eerste gedeelte van het programma zie je als laatste regel staan.
LandjeRobot landjerobot(motor, LandjeRobotMotorController::STEPMODE::FULL_STEP, wheelRadiusMM ,
trackWidthMM, lineSensors, lineSensorInverse, ultraPin, servoPin,mouthledPin) ;
Met deze lange instructie wordt de robot ingesteld. Na het uitvoeren van deze regel kun je de variabele landjerobot gebruiken om instructies aan de robot te geven. Je geeft een instructie door aan de variabele landjerobot de instructie te plakken. Je plakt een instructie aan landjerobot door middel van een punt. Bijvoorbeeld;
landjerobot.talk(5) ;
Het plakken van een instructie achter de variabele landjerobot, noem je het geven van een instructie. Als er dus ergens staat ‘geef de instructie move’ programmeer je dus landjerobot.move(). In de volgende paragraaf leer je meer over alle speciale instructies die de Landje robot begrijpt.
De Landje robot heeft verschillende instructies. Bij sommige instructies kun of moet je iets extra’s aan de instructie doorgeven. Als je de robot wilt laten bewegen kun je bijvoorbeeld vertellen welke richting hij moet op rijden. Het iets extra’s doorgeven aan een instructie noemen we doorgeven. Je geeft dus aan de instructie move door welke richting hij op moet rijden.
landjerobot.move(LandjeRobot::DIRECTION::FORWARD) ;
Met LandjeRobot::DIRECTION::FORWARD geef je aan de landjerobot door dat het vooruit moet bewegen. Het engelse woord FORWARD betekent vooruit, DIRECTION betekent richting. Je vertelt LandjeRobot robot dus dat hij in de DIRECTION FORWARD moet bewegen.
Wat je aan de robot doorgeeft heet parameter. Aan elke instructie kan geen, één of meerdere parameters worden doorgegeven. Hoeveel en welke parameters je kan doorgeven verschilt per instructie.
Bij sommige instructies mag je sommige parameters opgegeven, maar hoeft dit niet. Als je de instructie move opgeeft mag je de parameter wachten opgeven, maar het hoeft niet. Je mag dus de instructie landerobot.move(LandjeRobot::DIRECTION::FORWARD,10) geven maar ook landerobot.move(LandjeRobot::DIRECTION::FORWARD). Bij de eerste instructie zal de robot 10 centimeter vooruit gaan rijden. Bij de tweede instructie zal de robot net zolang vooruit blijven rijden totdat je de instructie geeft om te stoppen. Als je een parameter niet opgeeft zal een waarde gekozen worden. Deze gekozen waarde noemt men de standaard waarde. Voor de parameter afstand is dit oneindig (∞).
Als je in deze handleiding de parameter voor instructies opzoekt is er één waarde voor een parameter onderstreept. Dit is de waarde welke voor de parameter gekozen zal worden als je de parameter niet doorgeeft aan de instructie. Kijk eens bij de instructie move, daar staat dat de waarde ‘∞’ onderstreept. Het teken ‘∞’ betekend oneindig. Als je de parameter afstand niet opgeeft blijft de robot oneindig doorrijden.
Instructies kunnen ook een waarde teruggeven. Als een instructie een waarde teruggeeft staat dit bij de instructie in de handleiding vermeld. De instructie doIMove heeft geen parameters, maar geeft wel een waarde terug. Als de robot beweegt krijg je true, anders false.
Omschrijving
Geeft aan of er een lijn op de vloer wordt gedetecteerd
Syntax
detectLine() ;
Parameters
geen
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| LandjeRobot::LINE::NONELandjeRobot::LINE::LEFT LandjeRobot::LINE::RIGHT LandjeRobot::LINE::BOTH | NONE geeft aan dat er geen lijn gedetecteerd wordt. Bij BOTH wordt zowel links als rechts een lijn gedetecteerd |
Voorbeeld
if (landjerobot.detectLine() != LandjeRobot::LINE::NONE) {
Serial.println("Er is een lijn gedetecteerd") ;
}
Omschrijving
Geeft aan of de robot beweegt.
Syntax
doIMove() ;
Parameters
geen
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| bool | true | Deze waarde wordt teruggegeven als de robot aan het bewegen is |
| bool | false | Als de robot niet beweegt wordt deze waarde teruggeveven |
Voorbeeld
// beweeg de robot vooruit
landjerobot.move(LandjeRobot::DIRECTION::FORWARD) ;
if (landjerobot.doIMove()) {
Serial.println("Ik beweeg!") ;
}
Omschrijving
Geeft aan of de robot aan het praten is.
Syntax
doITalk() ;
Parameters
geen
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| bool | true | Deze waarde wordt teruggegeven als de robot aan het praten is |
| bool | false | Als de robot niet praat wordt deze waarde teruggeveven |
Voorbeeld
// Laat de robot praten voor 60 seconden
landjerobot.talk(60) ;
if (landjerobot.doITalk()) {
Serial.println("Ik praat!") ;
}
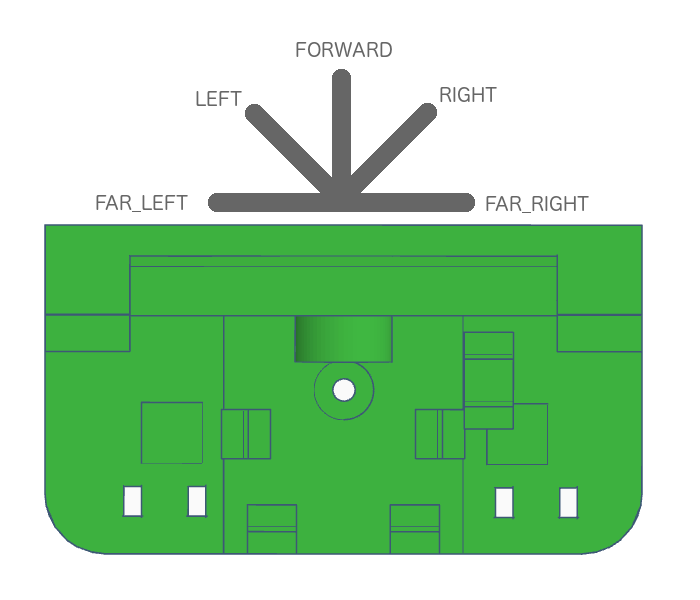
Omschrijving
Laat de robot in een richting kijken
Syntax
look( richting ) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| richting | LandjeRobot::LOOK::FORWARDLandjeRobot::LOOK::LEFTLandjeRobot::LOOK::RIGHTLandjeRobot::LOOK::FAR_LEFTLandjeRobot::LOOK::FAR_RIGHT |
Kijkrichtingen van de robot
Geeft terug
niets
Voorbeeld
// Kijk naar links
landjerobot.look(LandjeRobot::LOOK::LEFT) ;Omschrijving
Meet de afstand van de robot tot een ander object
Syntax
measureDistance() ;
Parameters
geen
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| int | 2..400 | Afstand in centimeters |
Voorbeeld
int gemetenAfstand = 0 ;
// Meet de afstand van de robot tot een ander object
gemetenAfstand = landjerobot.measureDistance() ;
Serial.print("Gemeten afstand ") ;
Serial.print(gemetenAfstand) ;
Serial.println(" cm") ;
Omschrijving
Geeft aan in welke stand de mode schakelaar staat.
Syntax
mode() ;
Parameters
geen
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| int | 1 | Schakelaar staat in stand 1 |
| int | 2 | Schakelaar staat in stand 2 |
Voorbeeld
if (landjerobot.mode() == 1) {
Serial.println("Mode 1") ;
} else {
Serial.println("Mode 2") ;
}
Omschrijving
Laat de robot zijn mond ‘dicht’ doen door het led-je uit te zetten
Syntax
mouthClosed() ;
Parameters
geen
Geeft terug
niets
Voorbeeld
// Laat de robot zijn mond dicht doen
landjerobot.mouthClosed();Omschrijving
Laat de robot zijn mond ‘open’ doen door het led-je aan te zetten
Syntax
mouthOpen() ;
Parameters
geen
Geeft terug
niets
Voorbeeld
// Laat de robot zijn mond open doen
landjerobot.mouthOpen();Omschrijving
Laat de robot in een richting bewegen
Syntax
move( richting ) ;
move( richting , afstand) ;
move( richting , afstand, wachten) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| richting | LandjeRobot::DIRECTION::STOP LandjeRobot::DIRECTION::FORWARDLandjeRobot::DIRECTION::BACKWARD | ||
| afstand | int | 0.. ∞ | De afstand die bewogen moet worden in centimeters |
| wachten | bool | truefalse | Wacht (true) met het uitvoeren van de volgende instructie totdat de opgegeven afstand is afgelegd |
Geeft terug
niets
Voorbeeld
// beweeg de robot vooruit
landjerobot.move(LandjeRobot::DIRECTION::FORWARD) ;
// beweeg de robot 10cm achteruit
landjerobot.move(LandjeRobot::DIRECTION::BACKWARD,10) ;
// beweeg de robot 20cm vooruit en wacht
// totdat de opgegeven afstand is afgelegd
landjerobot.move(LandjeRobot::DIRECTION::FORWARD,20,true) ;
Omschrijving
Laat de robot ‘praten’ door een lichtje in de mond te laten knipperen.
Syntax
talk( duur ) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| duur | int | 0..∞ | Aantal seconden dat de robot ‘praat’ |
Geeft terug
niets
Voorbeeld
// Praat 7 seconden
landjerobot.talk(7);Omschrijving
Laat de robot in een bepaalde richting draaien
Syntax
turn( richting ) ;
turn( richting , hoek) ;
turn( richting , hoek, wachten) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| richting | LandjeRobot::TURN::STRAIGHTLandjeRobot::TURN::LEFTLandjeRobot::TURN::RIGHT | De draairichting van de robot. De waarde STRAIGHT laat de robot weer recht voor- of achteruit rijden | |
| hoek | int | 0..360 90 | Het aantal graden dat de robot moet draaien. Een hoek van 90 graden is een rechte hoek |
| wachten | bool | truefalse | Wacht (true) met het uitvoeren van de volgende instructie totdat de opgegeven afstand is afgelegd |
Draairichtingen van de robot
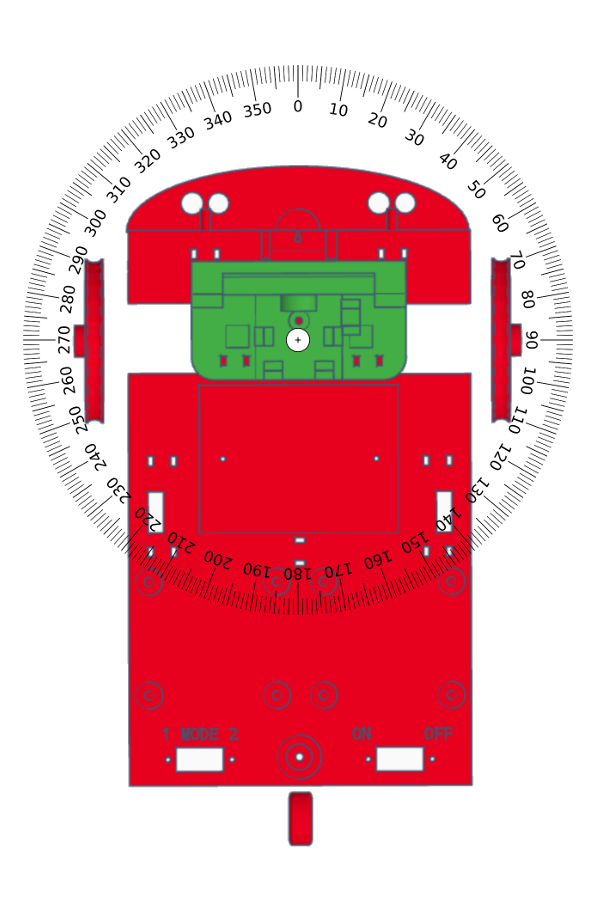
Geeft terug
niets
Voorbeeld
// draai de robot naar links
landjerobot.turn(LandjeRobot::TURN::LEFT) ;
// laat de robot een rondje rechtsom draaien
landjerobot.turn(LandjeRobot::TURN::RIGHT,360) ;
Arduino instructies zijn voor alle Arduino computers, dus niet speciaal voor deze robot. Waar je bij Landje Robot instructies landjerobot. voor de instructie moet typen, hoeft en kan dit niet voor Arduino instructies. Bij Arduino instructies gebruik je gewoon de instructienaam.
Wil je meer instructies leren van de Arduino, dan kun je een kijkje nemen in de Arduino Language Referece.
Omschrijving
Wacht een aantal milliseconden. Duizend (1000) milliseconden is gelijk aan 1 seconde.
Syntax
delay( duur ) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| duur | int | 0..∞ | Aantal milliseconden dat er gewacht wordt. |
Geeft terug
niets
Voorbeeld
// Wacht twee seconden
delay(2000) ; Omschrijving
Geef een willekeurig getal
Syntax
random( kleinste getal, grootste getal ) ;
Parameters
| Parameter | Type | Waarden | Opmerkingen |
|---|---|---|---|
| kleinste getal | int | 0..∞ | Kleinste waarde dat als willekeurg getal terugegeven kan worden |
| grootste getal | int | 0..∞ | Grootste waarde dat als willekeurg getal terugegeven kan worden |
Geeft terug
| Type | Waarde | Opmerkingen |
|---|---|---|
| long | - | Een willekeurig getal gelijk of groter dan het opgegeven kleinste getal en gelijk of kleiner dan het opgegeven grootste getal. |
Het type long is niet uitgelegd. Maar voor de robot mag je ook het type int gebruiken.
Voorbeeld
// Geef een willeurig getal,
// groter of gelijk aan 10 en
// kleiner of gelijk aan 20
int a = random(10,20) ;